ਇਲੈਕਟ੍ਰਾਨਿਕ ਉਦਯੋਗ ਦੇ ਜ਼ੋਰਦਾਰ ਵਿਕਾਸ ਦੇ ਨਾਲ, ਕੁਝ ਢਾਂਚਾਗਤ ਹਿੱਸਿਆਂ ਦੀ ਸਥਿਤੀ ਦੀ ਪਛਾਣ ਹੌਲੀ-ਹੌਲੀ ਅਸਲ ਸੰਪਰਕ ਮਾਪ ਤੋਂ ਗੈਰ-ਸੰਪਰਕ ਮਾਪ ਵਿੱਚ ਬਦਲ ਜਾਂਦੀ ਹੈਹਾਲ ਸਥਿਤੀ ਸੂਚਕ ਅਤੇ ਚੁੰਬਕ. ਅਸੀਂ ਆਪਣੇ ਉਤਪਾਦਾਂ ਅਤੇ ਢਾਂਚੇ ਦੇ ਅਨੁਸਾਰ ਇੱਕ ਢੁਕਵਾਂ ਚੁੰਬਕ ਕਿਵੇਂ ਚੁਣ ਸਕਦੇ ਹਾਂ? ਇੱਥੇ ਅਸੀਂ ਕੁਝ ਸਧਾਰਨ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਦੇ ਹਾਂ।
ਪਹਿਲਾਂ, ਸਾਨੂੰ ਚੁੰਬਕ ਸਮੱਗਰੀ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਦੀ ਲੋੜ ਹੈ। ਵਰਤਮਾਨ ਵਿੱਚ, ਸਮਰੀਅਮ ਕੋਬਾਲਟ ਮੈਗਨੇਟ ਅਤੇ ਨਿਓਡੀਮੀਅਮ ਆਇਰਨ ਬੋਰਾਨ ਨੂੰ ਹਾਲ ਸਥਿਤੀ ਸੂਚਕ ਵਿੱਚ ਵਿਆਪਕ ਤੌਰ 'ਤੇ ਵਰਤਿਆ ਜਾਂਦਾ ਹੈ। ਦੋ ਚੁੰਬਕਾਂ ਵਿਚਕਾਰ ਮੁੱਖ ਅੰਤਰ ਇਹ ਹੈ ਕਿ ਇੱਕੋ ਵਾਲੀਅਮ 'ਤੇ ਆਧਾਰਿਤ NdFeB ਚੁੰਬਕ ਸਾਮੇਰੀਅਮ ਕੋਬਾਲਟ ਮੈਗਨੇਟ ਨਾਲੋਂ ਮਜ਼ਬੂਤ ਹੁੰਦੇ ਹਨ; ਸਮਰੀਅਮ ਕੋਬਾਲਟ ਦਾ ਥਰਮਲ ਸੈਰ ਐਨਡੀ-ਫੇ-ਬੀ ਨਾਲੋਂ ਛੋਟਾ ਹੈ; ਸਮੈਰੀਅਮ ਕੋਬਾਲਟ ਦਾ ਆਕਸੀਕਰਨ ਪ੍ਰਤੀਰੋਧ Nd-Fe-B ਨਾਲੋਂ ਮਜ਼ਬੂਤ ਹੁੰਦਾ ਹੈ, ਪਰ ਆਮ ਤੌਰ 'ਤੇ ਚੁੰਬਕ ਦੇ ਬਾਹਰਲੇ ਪਾਸੇ ਇੱਕ ਪਰਤ ਹੁੰਦੀ ਹੈ, ਜੋ ਆਕਸੀਕਰਨ ਦੀ ਸਮੱਸਿਆ ਨੂੰ ਹੱਲ ਕਰ ਸਕਦੀ ਹੈ; ਸਮਰੀਅਮ ਕੋਬਾਲਟ ਚੁੰਬਕ ਵਿੱਚ NdFeB ਚੁੰਬਕ ਨਾਲੋਂ ਬਿਹਤਰ ਤਾਪਮਾਨ ਪ੍ਰਤੀਰੋਧ ਹੈ, ਪਰ ਦੋਵੇਂ ਚੁੰਬਕ ਸਮੱਗਰੀਆਂ ਲਈ ਤਾਪਮਾਨ ਪ੍ਰਤੀਰੋਧ ਮੁੱਲ 200 ℃ ਤੋਂ ਵੱਧ ਪਹੁੰਚ ਸਕਦਾ ਹੈ। ਇਸ ਲਈ, ਚੁੰਬਕ ਦੀ ਕਿਸਮ ਦੀ ਚੋਣ ਕਰਦੇ ਸਮੇਂ, ਸਾਨੂੰ ਲਾਗਤ ਪ੍ਰਦਰਸ਼ਨ, ਕੰਮਕਾਜੀ ਤਾਪਮਾਨ ਅਤੇ ਕੰਮ ਕਰਨ ਵਾਲੇ ਵਾਤਾਵਰਣ ਦੇ ਨਾਲ ਇਸ ਦਾ ਮੁਲਾਂਕਣ ਕਰਨਾ ਚਾਹੀਦਾ ਹੈ। ਆਮ ਤੌਰ 'ਤੇ, NdFeB ਦੀ ਵਧੇਰੇ ਵਰਤੋਂ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ, ਮੁੱਖ ਤੌਰ 'ਤੇ ਕਿਉਂਕਿ ਇਸ ਵਿੱਚ ਸਭ ਤੋਂ ਵਧੀਆ ਚੁੰਬਕੀ ਖੇਤਰ ਵਿਸ਼ੇਸ਼ਤਾਵਾਂ ਹਨ। ਹਾਲਾਂਕਿ, ਜਦੋਂ ਇੱਕ ਵਿਆਪਕ ਤਾਪਮਾਨ ਰੇਂਜ ਵਿੱਚ ਕੰਮ ਕਰਦੇ ਹੋ, ਤਾਂ ਇਸਦੇ ਛੋਟੇ ਥਰਮਲ ਡ੍ਰਾਇਫਟ ਦੇ ਕਾਰਨ ਸੈਮਰੀਅਮ ਕੋਬਾਲਟ ਮੈਗਨੇਟ ਦੀ ਚੋਣ ਕਰਨ ਦੀ ਸਿਫਾਰਸ਼ ਕੀਤੀ ਜਾਂਦੀ ਹੈ।
ਇਸ ਤੋਂ ਇਲਾਵਾ, ਸਾਨੂੰ ਚੁੰਬਕ ਦੇ ਕੁਝ ਬੁਨਿਆਦੀ ਮਾਪਦੰਡਾਂ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰਨ ਦੀ ਲੋੜ ਹੈ। ਟੈਸਟ ਸਥਿਤੀ ਜਾਣਕਾਰੀ ਅਤੇ ਵਸਤੂ ਦੀ ਗਤੀਸ਼ੀਲ ਦਿਸ਼ਾ ਦੇ ਅਨੁਸਾਰ, ਅਸੀਂ ਇਹ ਨਿਰਧਾਰਤ ਕਰਦੇ ਹਾਂ ਕਿ ਕੀ ਚੁੰਬਕ ਦੀ ਚੁੰਬਕੀ ਦਿਸ਼ਾ ਵਿਆਸ ਹੈ ਜਾਂ ਧੁਰੀ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਇਹ ਨਿਰਧਾਰਤ ਕੀਤਾ ਜਾਂਦਾ ਹੈ ਕਿ ਕੀ ਏਵਰਗ ਚੁੰਬਕਜਾਂ ਏਸਿਲੰਡਰ ਚੁੰਬਕਇੰਸਟਾਲੇਸ਼ਨ ਬਣਤਰ ਦੇ ਅਨੁਸਾਰ. ਬੇਸ਼ੱਕ, ਕਈ ਵਾਰ ਸਾਨੂੰ ਢਾਂਚੇ ਦੇ ਅਨੁਸਾਰ ਚੁੰਬਕ ਦੀ ਸ਼ਕਲ ਨੂੰ ਅਨੁਕੂਲਿਤ ਕਰਨ ਦੀ ਲੋੜ ਹੁੰਦੀ ਹੈ. ਚੁੰਬਕ ਪ੍ਰਵਾਹ ਬਾਰੇ ਲੋੜ ਦਾ ਇੱਕ ਹੋਰ ਕਾਰਕ ਹੈ, ਜੋ ਕਿ ਚੁੰਬਕ ਚੋਣ ਵਿੱਚ ਹਮੇਸ਼ਾ ਸਾਡੀ ਚਿੰਤਾ ਰਿਹਾ ਹੈ। ਅਸਲ ਵਿੱਚ, ਸਾਨੂੰ ਹੇਠਾਂ ਦਿੱਤੇ ਦੋ ਪਹਿਲੂਆਂ ਵਿੱਚ ਇਸਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਨ ਦੀ ਲੋੜ ਹੈ:
1. ਹਾਲ ਪੋਜੀਸ਼ਨ ਸੈਂਸਰ ਦੁਆਰਾ ਪ੍ਰੇਰਿਤ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਅਤੇ ਹਰੇਕ ਦਿਸ਼ਾ ਵਿੱਚ ਪ੍ਰੇਰਿਤ ਚੁੰਬਕੀ ਖੇਤਰ ਰੇਂਜ ਨੂੰ ਸੈਂਸਰ ਡੇਟਾ ਬੁੱਕ ਵਿੱਚ ਸਪਸ਼ਟ ਤੌਰ 'ਤੇ ਚਿੰਨ੍ਹਿਤ ਕੀਤਾ ਜਾਵੇਗਾ।
2. ਚੁੰਬਕ ਅਤੇ ਸੈਂਸਰ ਵਿਚਕਾਰ ਦੂਰੀ ਆਮ ਤੌਰ 'ਤੇ ਉਤਪਾਦ ਬਣਤਰ ਦੁਆਰਾ ਨਿਰਧਾਰਤ ਕੀਤੀ ਜਾਂਦੀ ਹੈ। ਉਪਰੋਕਤ ਦੋ ਪਹਿਲੂਆਂ ਅਤੇ ਇੱਕ ਉਦਾਹਰਨ ਦੇ ਤੌਰ 'ਤੇ ਹੇਠਾਂ ਦਿੱਤੇ ਚਿੱਤਰ ਵਿੱਚ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਬਦੀਲੀ ਵਕਰ ਦੇ ਅਨੁਸਾਰ, ਅਸੀਂ ਲੋੜੀਂਦੇ ਚੁੰਬਕ ਦੀ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਤਾਕਤ ਨੂੰ ਨਿਰਧਾਰਤ ਕਰ ਸਕਦੇ ਹਾਂ।
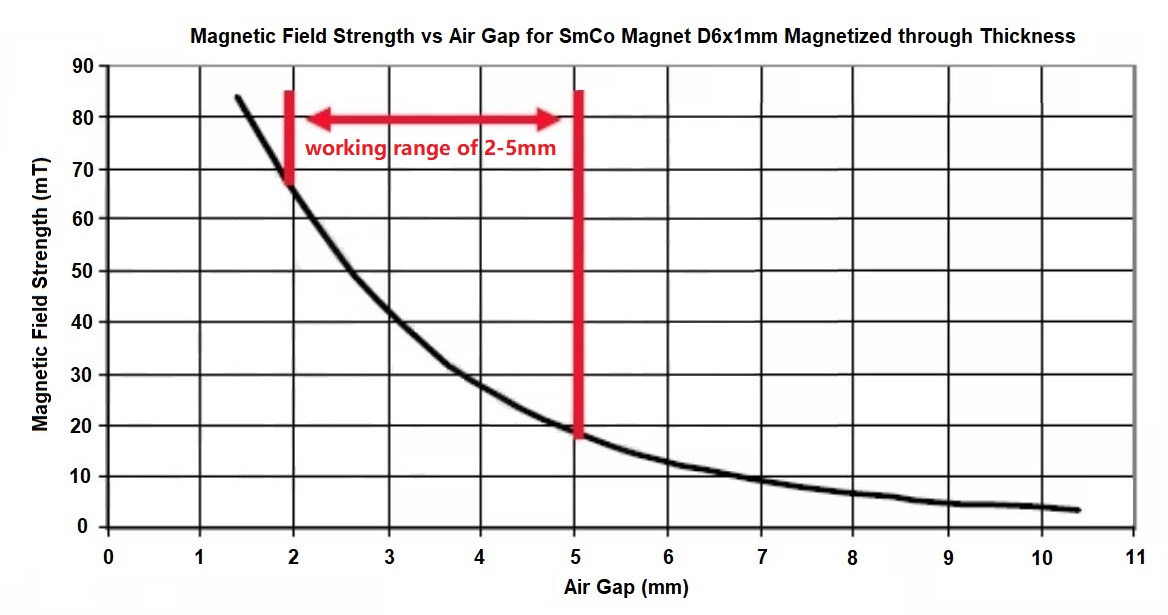
ਅੰਤ ਵਿੱਚ, ਸਾਨੂੰ ਇਹ ਸਮਝਣ ਦੀ ਜ਼ਰੂਰਤ ਹੈ ਕਿ ਇਸਦਾ ਮਤਲਬ ਇਹ ਨਹੀਂ ਹੈ ਕਿ ਜਿੰਨਾ ਚਿਰ ਚੁੰਬਕੀ ਖੇਤਰ ਸੈਂਸਰ ਦੀਆਂ ਰੇਂਜ ਲੋੜਾਂ 'ਤੇ ਡਿੱਗਦਾ ਹੈ, ਚੁੰਬਕ ਸੈਂਸਰ ਤੋਂ ਓਨਾ ਹੀ ਦੂਰ ਹੋ ਸਕਦਾ ਹੈ। ਹਾਲਾਂਕਿ ਸੈਂਸਰ ਵਿੱਚ ਆਪਣੇ ਆਪ ਵਿੱਚ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਫੰਕਸ਼ਨ ਹੁੰਦਾ ਹੈ, ਸਾਨੂੰ ਇਹ ਸਮਝਣ ਦੀ ਜ਼ਰੂਰਤ ਹੁੰਦੀ ਹੈ ਕਿ ਜਦੋਂ ਚੁੰਬਕ ਸੈਂਸਰ ਤੋਂ ਬਹੁਤ ਦੂਰ ਹੁੰਦਾ ਹੈ, ਤਾਂ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਵੰਡ ਆਪਣੇ ਆਪ ਵਿੱਚ ਰੇਖਿਕਤਾ ਜਾਂ ਰੇਖਿਕਤਾ ਦੇ ਨੇੜੇ ਹੋਣ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣਾ ਮੁਸ਼ਕਲ ਹੁੰਦਾ ਹੈ। ਇਸਦਾ ਮਤਲਬ ਹੈ ਕਿ ਸਥਿਤੀ ਦੇ ਬਦਲਣ ਅਤੇ ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਗੈਰ-ਰੇਖਿਕ ਵੰਡ ਦੇ ਨਾਲ, ਸੈਂਸਰ ਮਾਪ ਗੁੰਝਲਦਾਰ ਬਣ ਜਾਵੇਗਾ ਅਤੇ ਕੈਲੀਬ੍ਰੇਸ਼ਨ ਬਹੁਤ ਗੁੰਝਲਦਾਰ ਬਣ ਜਾਵੇਗਾ, ਤਾਂ ਜੋ ਉਤਪਾਦ ਦੀ ਕਮੀ ਨਾ ਹੋਵੇ।
ਉਪਰੋਕਤ ਹਾਲ ਸੈਂਸਰ ਐਪਲੀਕੇਸ਼ਨਾਂ ਵਿੱਚ ਚੁੰਬਕ ਚੋਣ ਦਾ ਇੱਕ ਸਧਾਰਨ ਵਿਸ਼ਲੇਸ਼ਣ ਹੈ। ਸਾਨੂੰ ਉਮੀਦ ਹੈ ਕਿ ਇਹ ਤੁਹਾਡੇ ਲਈ ਮਦਦਗਾਰ ਹੋਵੇਗਾ। ਜੇਕਰ ਤੁਹਾਡੇ ਕੋਲ ਵਿਕਾਸ ਪ੍ਰਕਿਰਿਆ ਦੇ ਦੌਰਾਨ ਹੋਰ ਸਵਾਲ ਹਨ, ਤਾਂ ਕਿਰਪਾ ਕਰਕੇ ਸਾਡੇ ਨਾਲ ਸੰਪਰਕ ਕਰੋ,ਨਿੰਗਬੋ ਹੋਰੀਜ਼ਨ ਮੈਗਨੈਟਿਕਸ. ਅਸੀਂ ਹੋਰ ਸੰਚਾਰ ਕਰ ਸਕਦੇ ਹਾਂ ਅਤੇ ਤੁਹਾਨੂੰ ਤਕਨੀਕੀ ਸਹਾਇਤਾ ਪ੍ਰਦਾਨ ਕਰ ਸਕਦੇ ਹਾਂ।
ਪੋਸਟ ਟਾਈਮ: ਅਗਸਤ-12-2021