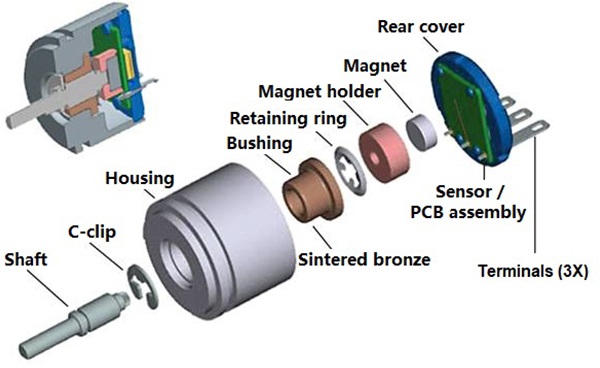
ਜੇਕਰ ਤੁਹਾਡੇ ਕੋਲ ਇੱਕ ਚੁੰਬਕੀ ਰੋਟਰੀ ਏਨਕੋਡਰ ਨੂੰ ਵੱਖ ਕਰਨ ਦਾ ਮੌਕਾ ਹੈ, ਤਾਂ ਤੁਸੀਂ ਆਮ ਤੌਰ 'ਤੇ ਉੱਪਰ ਦਿਖਾਇਆ ਗਿਆ ਇੱਕ ਅੰਦਰੂਨੀ ਢਾਂਚਾ ਦੇਖੋਗੇ। ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਇੱਕ ਮਕੈਨੀਕਲ ਸ਼ਾਫਟ, ਇੱਕ ਸ਼ੈੱਲ ਬਣਤਰ, ਏਨਕੋਡਰ ਦੇ ਅੰਤ ਵਿੱਚ ਇੱਕ PCB ਅਸੈਂਬਲੀ, ਅਤੇ ਇੱਕ ਛੋਟੇਡਿਸਕ ਚੁੰਬਕਮਕੈਨੀਕਲ ਸ਼ਾਫਟ ਦੇ ਅੰਤ 'ਤੇ ਸ਼ਾਫਟ ਦੇ ਨਾਲ ਘੁੰਮਣਾ.
ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਰੋਟੇਸ਼ਨ ਸਥਿਤੀ ਫੀਡਬੈਕ ਨੂੰ ਕਿਵੇਂ ਮਾਪਦਾ ਹੈ?
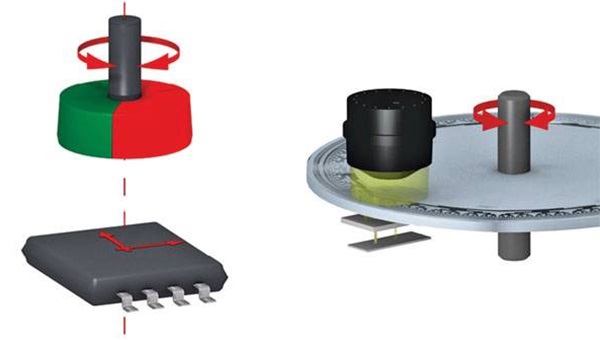
ਹਾਲ ਇਫੈਕਟ: ਇਲੈਕਟ੍ਰਿਕ ਕਰੰਟ ਨੂੰ ਲੈ ਕੇ ਜਾਣ ਵਾਲੇ ਕੰਡਕਟਰ ਵਿੱਚ ਸੰਭਾਵੀ ਅੰਤਰ ਦਾ ਉਤਪਾਦਨ ਜਦੋਂ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਕਰੰਟ ਦੇ ਵਹਿਣ ਦੀ ਦਿਸ਼ਾ ਵਿੱਚ ਲੰਬਕਾਰੀ ਦਿਸ਼ਾ ਵਿੱਚ ਲਾਗੂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ।
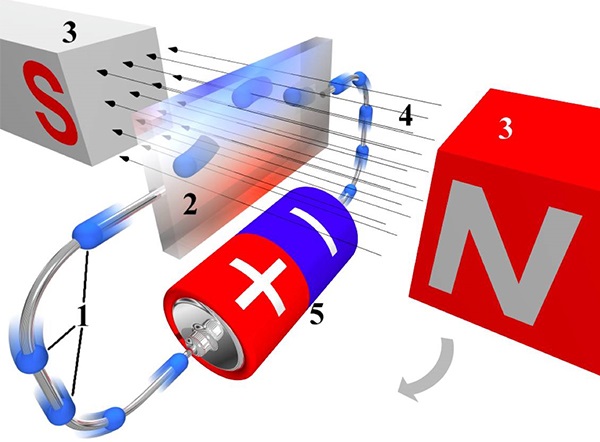
ਜੇਕਰ ਕੰਡਕਟਰ 'ਤੇ ਲਾਗੂ ਚੁੰਬਕੀ ਖੇਤਰ ਨੂੰ ਧੁਰੇ ਦੇ ਤੌਰ 'ਤੇ ਮੌਜੂਦਾ ਪ੍ਰਵਾਹ ਮਾਰਗ ਦੇ ਨਾਲ ਉਪਰੋਕਤ ਤੀਰ ਦੁਆਰਾ ਦਿਖਾਈ ਗਈ ਦਿਸ਼ਾ ਵਿੱਚ ਘੁੰਮਾਇਆ ਜਾਂਦਾ ਹੈ, ਤਾਂ ਚੁੰਬਕੀ ਖੇਤਰ ਅਤੇ ਕੰਡਕਟਰ ਦੇ ਵਿਚਕਾਰ ਕੋਣ ਦੀ ਤਬਦੀਲੀ ਕਾਰਨ ਹਾਲ ਸੰਭਾਵੀ ਅੰਤਰ ਬਦਲ ਜਾਵੇਗਾ, ਅਤੇ ਸੰਭਾਵੀ ਅੰਤਰ ਦੀ ਤਬਦੀਲੀ ਦਾ ਰੁਝਾਨ ਇੱਕ sinusoidal ਵਕਰ ਹੈ। ਇਸ ਲਈ, ਊਰਜਾਵਾਨ ਕੰਡਕਟਰ ਦੇ ਦੋਵੇਂ ਪਾਸੇ ਵੋਲਟੇਜ ਦੇ ਆਧਾਰ 'ਤੇ, ਚੁੰਬਕੀ ਖੇਤਰ ਦੇ ਰੋਟੇਸ਼ਨ ਐਂਗਲ ਦੀ ਗਣਨਾ ਉਲਟ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ। ਰੋਟੇਸ਼ਨ ਸਥਿਤੀ ਫੀਡਬੈਕ ਨੂੰ ਮਾਪਣ ਵੇਲੇ ਇਹ ਇੱਕ ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਦੀ ਬੁਨਿਆਦੀ ਕਾਰਜ ਪ੍ਰਣਾਲੀ ਹੈ।
ਇਸ ਸਿਧਾਂਤ ਦੇ ਸਮਾਨ ਹੈ ਕਿ ਰਿਜ਼ੋਲਵਰ ਆਪਸੀ ਲੰਬਕਾਰੀ ਆਉਟਪੁੱਟ ਕੋਇਲਾਂ ਦੇ ਦੋ ਸੈੱਟਾਂ ਦੀ ਵਰਤੋਂ ਕਰਦਾ ਹੈ, ਚੁੰਬਕੀ ਖੇਤਰ ਦੀ ਘੁੰਮਣ ਵਾਲੀ ਸਥਿਤੀ ਦੇ ਵਿਚਕਾਰ ਵਿਲੱਖਣ ਪੱਤਰ ਵਿਹਾਰ ਨੂੰ ਯਕੀਨੀ ਬਣਾਉਣ ਲਈ ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਵਿੱਚ ਆਪਸੀ ਲੰਬਕਾਰੀ ਮੌਜੂਦਾ ਦਿਸ਼ਾਵਾਂ ਵਾਲੇ ਦੋ (ਜਾਂ ਦੋ ਜੋੜੇ) ਹਾਲ ਇੰਡਕਸ਼ਨ ਤੱਤ ਵੀ ਲੋੜੀਂਦੇ ਹਨ। ਅਤੇ ਆਉਟਪੁੱਟ ਵੋਲਟੇਜ (ਸੁਮੇਲ)।
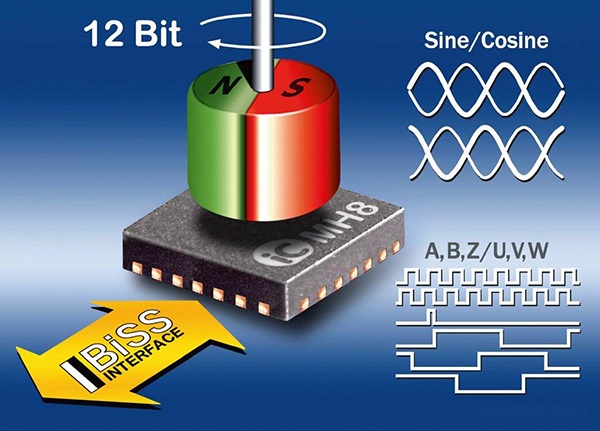
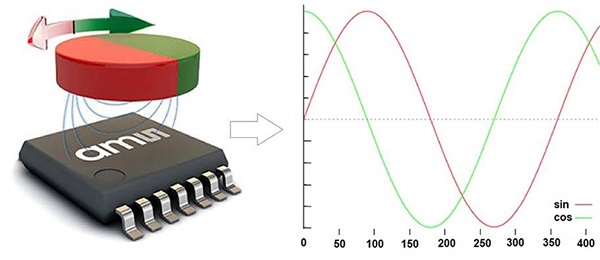
ਅੱਜਕੱਲ੍ਹ, ਚੁੰਬਕੀ ਏਨਕੋਡਰਾਂ ਵਿੱਚ ਵਰਤੇ ਜਾਣ ਵਾਲੇ ਹਾਲ ਸੈਂਸਰਾਂ (ਚਿਪਸ) ਵਿੱਚ ਆਮ ਤੌਰ 'ਤੇ ਉੱਚ ਪੱਧਰੀ ਏਕੀਕਰਣ ਹੁੰਦਾ ਹੈ, ਜੋ ਨਾ ਸਿਰਫ ਹਾਲ ਸੈਮੀਕੰਡਕਟਰ ਕੰਪੋਨੈਂਟਸ ਅਤੇ ਸੰਬੰਧਿਤ ਸਿਗਨਲ ਪ੍ਰੋਸੈਸਿੰਗ ਅਤੇ ਰੈਗੂਲੇਸ਼ਨ ਸਰਕਟਾਂ ਨੂੰ ਏਕੀਕ੍ਰਿਤ ਕਰਦਾ ਹੈ, ਸਗੋਂ ਕਈ ਤਰ੍ਹਾਂ ਦੇ ਸਿਗਨਲ ਆਉਟਪੁੱਟ ਮੋਡੀਊਲ ਨੂੰ ਵੀ ਏਕੀਕ੍ਰਿਤ ਕਰਦਾ ਹੈ, ਜਿਵੇਂ ਕਿ ਸਾਈਨ ਅਤੇ ਕੋਸਾਈਨ ਐਨਾਲਾਗ। ਸਿਗਨਲ, ਵਰਗ ਵੇਵ ਡਿਜੀਟਲ ਪੱਧਰ ਦੇ ਸਿਗਨਲ ਜਾਂ ਬੱਸ ਸੰਚਾਰ ਆਉਟਪੁੱਟ ਯੂਨਿਟ।
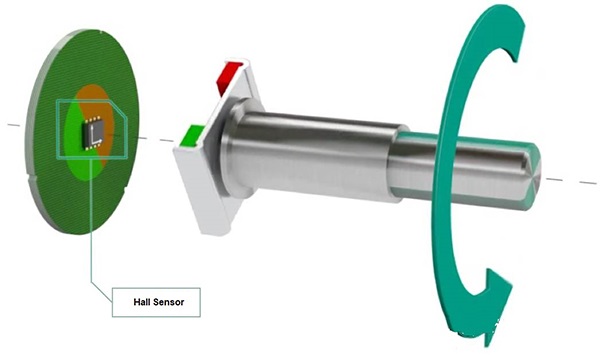
ਇਸ ਤਰ੍ਹਾਂ, ਇੱਕ ਸਥਾਈ ਚੁੰਬਕ ਜਿਵੇਂ ਕਿ ਸਿੰਟਰਡ ਨਿਓਡੀਮੀਅਮ ਚੁੰਬਕ ਨੂੰ ਸਥਾਪਿਤ ਕਰੋ ਜੋ ਏਨਕੋਡਰ ਰੋਟੇਟਿੰਗ ਸ਼ਾਫਟ ਦੇ ਅੰਤ ਵਿੱਚ ਇੱਕ ਚੁੰਬਕੀ ਖੇਤਰ ਪੈਦਾ ਕਰਦਾ ਹੈ, ਇੱਕ PCB ਸਰਕਟ ਬੋਰਡ ਉੱਤੇ ਉੱਪਰ ਦੱਸੇ ਗਏ ਹਾਲ ਸੈਂਸਰ ਚਿੱਪ ਨੂੰ ਰੱਖੋ, ਅਤੇ ਏਨਕੋਡਰ ਦੇ ਅੰਤ ਵਿੱਚ ਸਥਾਈ ਚੁੰਬਕ ਤੱਕ ਪਹੁੰਚੋ। ਕੁਝ ਖਾਸ ਲੋੜਾਂ (ਦਿਸ਼ਾ ਅਤੇ ਦੂਰੀ) ਦੇ ਅਨੁਸਾਰ ਸ਼ਾਫਟ.
PCB ਸਰਕਟ ਬੋਰਡ ਦੁਆਰਾ ਹਾਲ ਸੈਂਸਰ ਤੋਂ ਵੋਲਟੇਜ ਸਿਗਨਲ ਆਉਟਪੁੱਟ ਦਾ ਵਿਸ਼ਲੇਸ਼ਣ ਕਰਕੇ, ਏਨਕੋਡਰ ਰੋਟਰ ਦੀ ਘੁੰਮਣ ਵਾਲੀ ਸਥਿਤੀ ਦੀ ਪਛਾਣ ਕੀਤੀ ਜਾ ਸਕਦੀ ਹੈ।
ਚੁੰਬਕੀ ਐਨਕੋਡ ਦੀ ਬਣਤਰ ਅਤੇ ਕਾਰਜਸ਼ੀਲ ਸਿਧਾਂਤ ਇਸ ਸਥਾਈ ਚੁੰਬਕ ਬਾਰੇ ਵਿਸ਼ੇਸ਼ ਲੋੜਾਂ ਦਾ ਫੈਸਲਾ ਕਰਦਾ ਹੈ ਉਦਾਹਰਨ ਲਈ ਚੁੰਬਕ ਸਮੱਗਰੀ, ਚੁੰਬਕ ਦੀ ਸ਼ਕਲ, ਚੁੰਬਕੀਕਰਨ ਦਿਸ਼ਾ, ਆਦਿ।ਡਾਇਮੈਟ੍ਰਿਕਲੀ ਚੁੰਬਕੀ ਨਿਓਡੀਮੀਅਮ ਚੁੰਬਕਡਿਸਕ ਸਭ ਤੋਂ ਵਧੀਆ ਚੁੰਬਕ ਵਿਕਲਪ ਹੈ। ਨਿੰਗਬੋ ਹੋਰੀਜ਼ਨ ਮੈਗਨੈਟਿਕਸ ਕੁਝ ਅਕਾਰ ਦੇ ਨਾਲ ਚੁੰਬਕੀ ਏਨਕੋਡਾਂ ਦੇ ਬਹੁਤ ਸਾਰੇ ਨਿਰਮਾਤਾਵਾਂ ਨੂੰ ਸਪਲਾਈ ਕਰਨ ਵਿੱਚ ਤਜਰਬੇਕਾਰ ਹਨਡਾਇਮੈਟ੍ਰਿਕਲ ਨਿਓਡੀਮੀਅਮ ਡਿਸਕ ਮੈਗਨੇਟ, D6x2.5mm ਅਤੇ D10x2.5mm ਵਿਆਸ ਡਿਸਕ Neodymium ਮੈਗਨੇਟ ਜਿਨ੍ਹਾਂ ਵਿੱਚੋਂ ਸਭ ਤੋਂ ਪ੍ਰਸਿੱਧ ਮਾਡਲ ਹਨ।
ਇਹ ਦੇਖਿਆ ਜਾ ਸਕਦਾ ਹੈ ਕਿ ਰਵਾਇਤੀ ਆਪਟੀਕਲ ਏਨਕੋਡਰ ਦੇ ਮੁਕਾਬਲੇ, ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਨੂੰ ਇੱਕ ਗੁੰਝਲਦਾਰ ਕੋਡ ਡਿਸਕ ਅਤੇ ਪ੍ਰਕਾਸ਼ ਸਰੋਤ ਦੀ ਲੋੜ ਨਹੀਂ ਹੁੰਦੀ, ਭਾਗਾਂ ਦੀ ਗਿਣਤੀ ਘੱਟ ਹੁੰਦੀ ਹੈ, ਅਤੇ ਖੋਜ ਢਾਂਚਾ ਸਰਲ ਹੁੰਦਾ ਹੈ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਹਾਲ ਤੱਤ ਦੇ ਆਪਣੇ ਆਪ ਵਿਚ ਵੀ ਬਹੁਤ ਸਾਰੇ ਫਾਇਦੇ ਹਨ, ਜਿਵੇਂ ਕਿ ਫਰਮ ਬਣਤਰ, ਛੋਟਾ ਆਕਾਰ, ਹਲਕਾ ਭਾਰ, ਲੰਬੀ ਸੇਵਾ ਜੀਵਨ, ਵਾਈਬ੍ਰੇਸ਼ਨ ਪ੍ਰਤੀਰੋਧ, ਧੂੜ, ਤੇਲ, ਪਾਣੀ ਦੀ ਭਾਫ਼ ਅਤੇ ਲੂਣ ਧੁੰਦ ਦੇ ਪ੍ਰਦੂਸ਼ਣ ਜਾਂ ਖੋਰ ਦੀ ਉਡੀਕ ਤੋਂ ਡਰਨਾ ਨਹੀਂ.
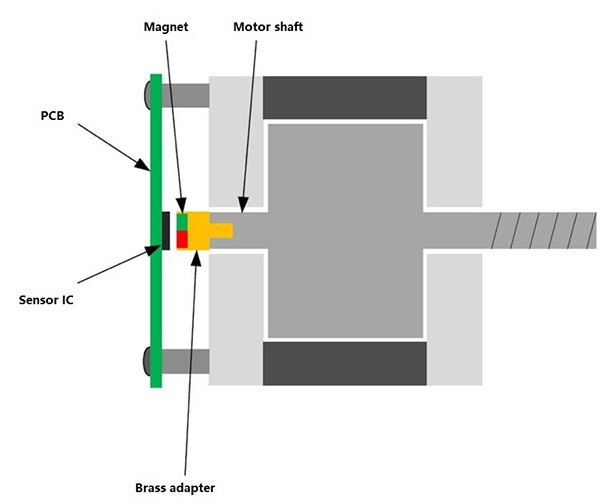
ਜਦੋਂ ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਤਕਨਾਲੋਜੀ ਨੂੰ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਦੀ ਰੋਟੇਸ਼ਨ ਸਥਿਤੀ ਫੀਡਬੈਕ 'ਤੇ ਲਾਗੂ ਕੀਤਾ ਜਾਂਦਾ ਹੈ, ਤਾਂsintered NdFeB ਚੁੰਬਕ ਸਿਲੰਡਰਦੇ ਚੁੰਬਕੀ ਏਨਕੋਡਰ ਨੂੰ ਸਿੱਧੇ ਮੋਟਰ ਸ਼ਾਫਟ ਦੇ ਅੰਤ 'ਤੇ ਸਥਾਪਿਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ. ਇਸ ਤਰ੍ਹਾਂ, ਇਹ ਪਰੰਪਰਾਗਤ ਫੀਡਬੈਕ ਏਨਕੋਡਰ ਦੀ ਵਰਤੋਂ ਕਰਦੇ ਸਮੇਂ ਲੋੜੀਂਦੇ ਪਰਿਵਰਤਨਸ਼ੀਲ ਕਪਲਿੰਗ ਬੇਅਰਿੰਗ (ਜਾਂ ਕਪਲਿੰਗ) ਨੂੰ ਖਤਮ ਕਰ ਸਕਦਾ ਹੈ, ਅਤੇ ਸੰਪਰਕ ਰਹਿਤ ਸਥਿਤੀ ਮਾਪ ਪ੍ਰਾਪਤ ਕਰ ਸਕਦਾ ਹੈ, ਜੋ ਕਿ ਦੌਰਾਨ ਮਕੈਨੀਕਲ ਸ਼ਾਫਟ ਦੇ ਵਾਈਬ੍ਰੇਸ਼ਨ ਕਾਰਨ ਏਨਕੋਡਰ ਅਸਫਲਤਾ (ਜਾਂ ਨੁਕਸਾਨ) ਦੇ ਜੋਖਮ ਨੂੰ ਘਟਾਉਂਦਾ ਹੈ। ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਦੀ ਕਾਰਵਾਈ. ਇਸ ਲਈ ਇਹ ਇਲੈਕਟ੍ਰਿਕ ਮੋਟਰ ਕਾਰਵਾਈ ਦੀ ਸਥਿਰਤਾ ਨੂੰ ਸੁਧਾਰਨ ਵਿੱਚ ਮਦਦ ਕਰਦਾ ਹੈ.
ਪੋਸਟ ਟਾਈਮ: ਜੁਲਾਈ-21-2022